教程演示🔗
课程描述
工业机器人 了解工业 6 轴拟人机器人的工作原理。我们将从逐步建立它的运动学模型开始,然后规划几何路径并优化运动轨迹。我们将学习如何正确确定电动机的尺寸并了解伺服驱动器的微调程序。我们将描述手臂、工具和单元的校准程序,并最终为您的模拟生成逼真的数字双胞胎!
你会学到什么
- 学习所有理论和实践细节以掌握工业机器人技术:求解运动学模型;规划几何路径和动态轨迹;调整运动控制系统;校准工具和电池。
- 我们专注于一个标准的 6 轴拟人化机器人,因为它是业界最常用的机器人之一,也是最复杂的机器人之一,所以一旦你了解了它的工作原理,你应该能够解决所有其他人的模型。
本课程适合谁
- 有兴趣了解工业机器人的数学模型及其最常见控制方法的学生和工程师。
工业机器人规范
- 发行商:Udemy
- 教师 : Fabrizio Frigeni
- 英语语言
- 级别 : 中级
- 课程数 : 63
- 时长:6小时0分钟
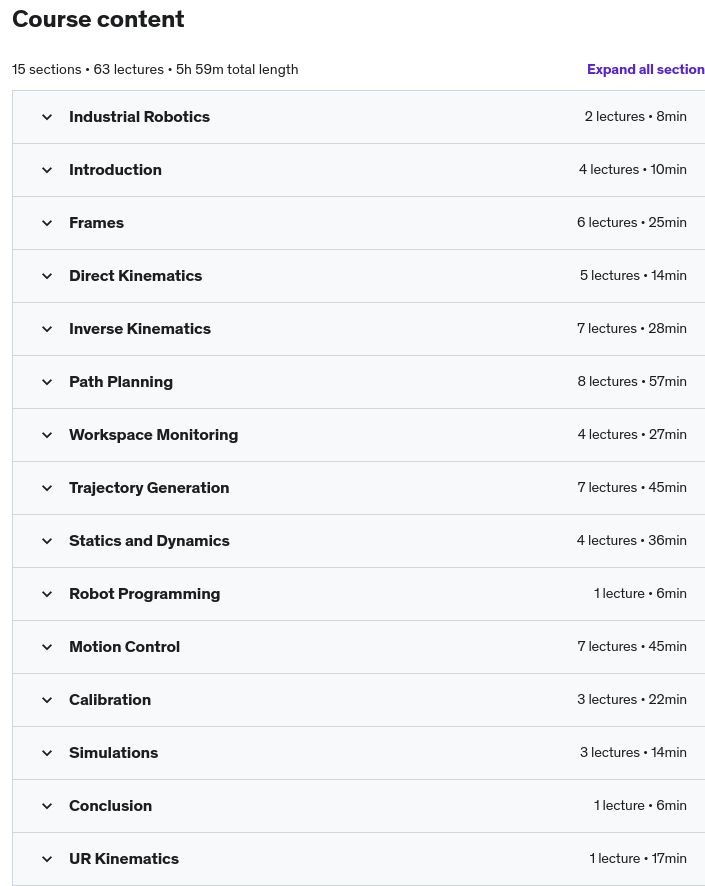
工业机器人的内容
要求
- 这门课并不太复杂,如果你有良好的数学基础,你应该能够很容易地跟进:具体来说,三角学、线性代数和一些微积分。
- 基本的编程技能也很好,但并不是严格要求的。这不是一门编程课程,即使您不编写一行代码,您也可以一直学习到最后,但是如果您实现我们在这里学习的模型,那肯定会对您更好、更有益转化为真实代码,并在真实或模拟机器人上进行测试。 C 通常是业界的首选语言,但最终决定权完全取决于您。
图片
样片
媒体错误:格式不受支持或来源未找到
安装指南
提取文件并使用您最喜欢的播放器观看
字幕:英语
画质:720p
下载链接
声明:本站所有文章,如无特殊说明或标注,均为本站发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。