


课程描述
工程师应用控制系统 2 – UAV 无人机控制是建模、状态空间系统、预测模型、反馈控制和 Python 方面的培训课程。未来几十年我们将面临的最大变化之一将是无人机自主性的出现。虽然无人机仍被广泛使用,但它们的使用会随着时间的推移而增长。无人机应用于快递服务、娱乐、医疗、军事、救援、人类难以接近的场所的质量监控等诸多领域。
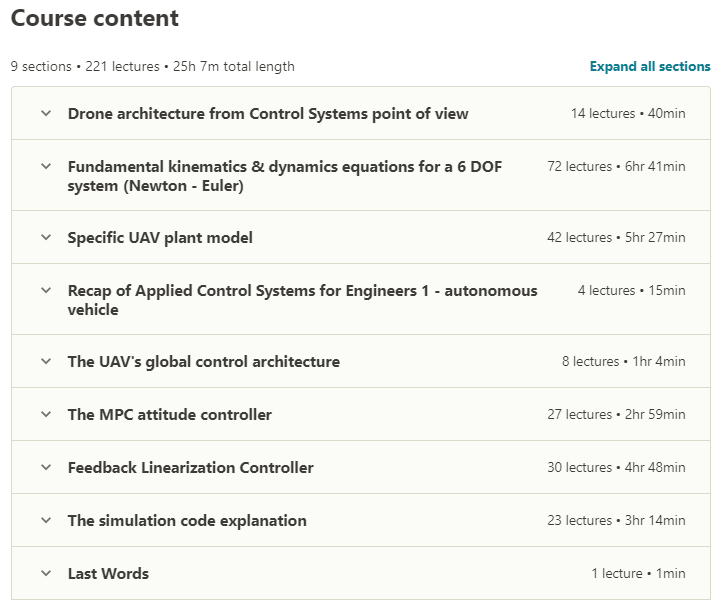
您将在工程师应用控制系统 2 – UAV 无人机控制中学到什么:
- 四轴飞行器遥控器的数学建模
- 运动学方程的获取:旋转和位移矩阵
- 学习 Newton-Euler 6 DOF 动力学方程,用于旋转坐标系的移动
- 了解陀螺仪的作用及其在无人机模型中的应用
- 了解Runge-Kutta的创造者并将其应用于无人机模型
- 获得技能并在无人机中应用预测控制模型
- 获得技能并使用无人机的线性反馈控制器
- 在一个全局控制器中结合 MPC 和反馈线性化
课程规格
出版商:Udemy 导师:Mark Misin 语言:英语 教育水平:中等 课程数量:221 持续时间:25 小时 7 分钟
课程主题工程师应用控制系统 – 无人机无人机控制 2021-3:
先修课程:
图片
样片
媒体错误:格式不受支持或来源未找到
安装指南
在 Extract 之后,用您最喜欢的播放器观看。
英文字幕
画质:720p
声明:本站所有文章,如无特殊说明或标注,均为本站发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。



