


课程描述
应用控制系统 2:自动驾驶汽车(360 度跟踪)是应用控制系统培训系列的第二部分,向您介绍自动驾驶汽车技术。在本培训课程中,您将学习有关重要主题的信息,例如创建 Python 模拟环境、建模自动驾驶系统、PID 控制器、模型预测控制等。在自动驾驶汽车的设计中,主要的挑战是保持汽车在正确的方向和定位上保持稳定,以朝着目标的方向移动。为此,汽车的加速度、初始速度和转向角等值应尽可能准确地设置,稍有不同就会导致不希望的结果。这些数值必须有一个合理的上下限,这样汽车才能在道路上以最佳状态运行。
本课程的讲师 Mark Misin 在机器人和航空航天领域工作,并打算将他的经验传授给感兴趣的人。在第一部分中,我们成功地使用 MPC 算法使汽车在自动模式下保持直线并变道。最后,通过优化汽车角度,您能够将非线性模型转变为时不变线性系统 (LTI),并使其相对于道路方向稍微更加灵活。这一变化使汽车总体上具有更好的导航功能,但也带来了一些限制。在第二部分中,我们将比之前更进一步,通过使用线性可变参数,我们将把普通的 MPC 控制器变成一个能够跟踪路径的非线性灵活系统。
您将在应用控制系统 2 中学到什么:自动驾驶汽车(360 度跟踪)
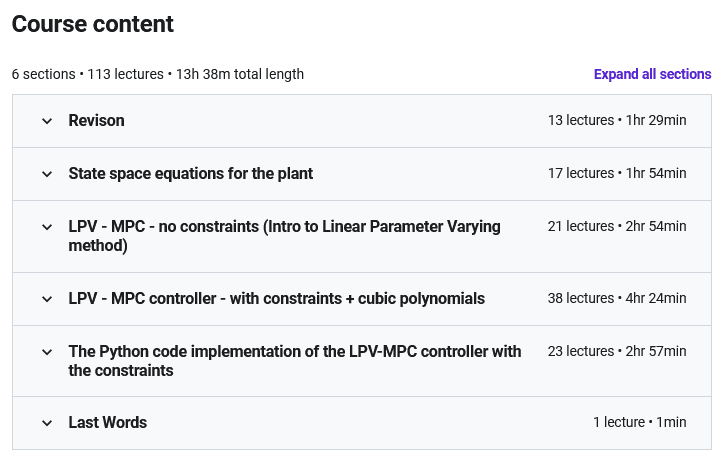
- 修改原始MPC并将其转换为固定时间线性系统(LTI)
- 熟悉运动方程和状态空间的形式
- 熟悉 MPC 控制器和限制器以及这些系统在汽车中的实现
- 使用自行车模型在二维环境中对自动驾驶汽车进行数学和计算建模
- 熟悉线性 MPC 及其在使用 LPV 公式的非线性系统中的实现
- 使用 Python 模拟汽车控制回路
课程规格
出版商:Udemy 讲师:Mark Misin Engineering Ltd 语言:英语水平:中级课程数量:112 持续时间:13 小时 33 分钟
课程主题
应用控制系统 2:自动驾驶汽车(360 度跟踪)先决条件
基本微积分:函数、导数、积分
向量矩阵乘法
Udemy 课程:应用控制系统 1:自动驾驶汽车(数学 + PID + MPC)
图片
Applied Control Systems 2:自动驾驶汽车(360 度跟踪)介绍视频
媒体错误:格式不受支持或来源未找到
安装指南
在 Extract 之后,用您最喜欢的播放器观看。
英文字幕
画质:720p
声明:本站所有文章,如无特殊说明或标注,均为本站发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。
![Udemy——打造你自己的自动驾驶汽车| [课程1 & 课程2] ( Build your Own Self Driving Car| [Course 1 & Course 2] )](https://www.postcode.vip/wp-content/uploads/2023/03/1677817284-790aacd421f44b9-300x200.png)


