


课程描述
Applied Control Systems 3:UAV 无人机(3D 动力学与控制)是 Applied Control Systems 培训系列的第三部分,重点介绍 UAV 和无人机。自行式车辆和无人机在设计过程中有明显的相似之处,并且都使用了一些共同的技术,例如模型预测控制和状态空间系统等。与汽车不同,在无人机的设计中,我们面临一个称为反馈控制的新主题,您将在本节的过程中简要了解它。设计和编程无人机是当今时代最受欢迎的工作之一,并且它们的使用日益增加。
无人机最重要的用途包括运输服务和现场货物交付、娱乐、军事用途、受害者营救和救援人员援助、结构质量检查和……。无人机由于体积小、机动性强,可以轻松穿越难度大、距离远的区域,执行各种任务。在智能无人机中,在三维环境中确定路径和目标点,然后机器人无需人工帮助和引导即可到达目的地。这些无人机的先进算法可以根据要求尽快确定到达目标的路径并立即向目标移动。无人机有多个桨叶,算法的任务通常是调整每个桨叶的旋转方向和速度,使其以一定角度运动。
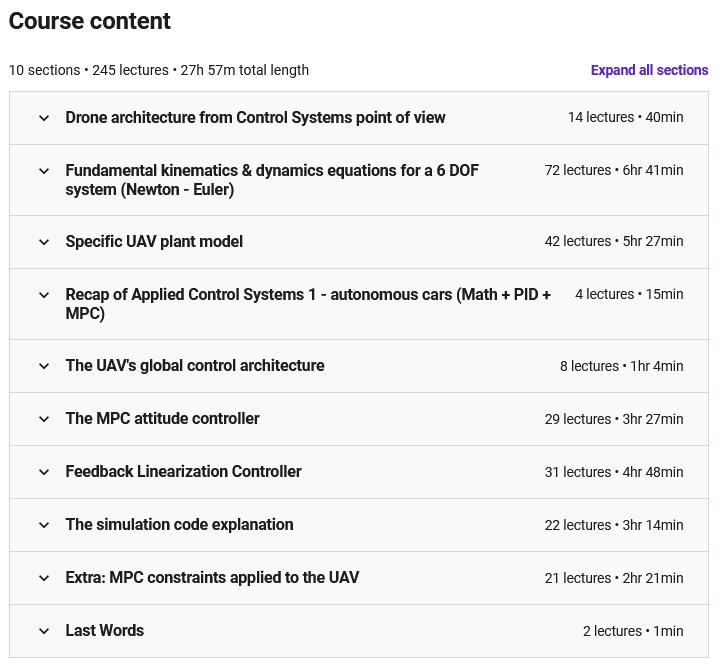
您将在 Applied Control Systems 3 中学到什么:无人机(3D 动力学和控制)
- 无人机建模并实现其控制机制
- 为无人机自动导航和定位定义 3D 环境
- 无人机制导控制系统的数学计算建模
- 熟悉最现代实用的无人机制导技术,如 MPC 和反馈线性化
- 无人机行业物理与应用数学概论
- 过渡和旋转矩阵
- 用Python编程语言模拟无人机
- 熟悉陀螺效应及其在模拟无人机模型中的实现
课程规格
出版商:Udemy 讲师:Mark Misin Engineering Ltd 语言:英语水平:中级课程数量:221 持续时间:25 小时 8 分钟
2021/10 课程主题
应用控制系统 3:无人机(3D 动力学与控制)先决条件
基本微积分:函数、导数、积分
向量矩阵乘法
Udemy 课程:应用控制系统 1:自动驾驶汽车(数学 + PID + MPC)
图片
Applied Control Systems 3:UAV无人机(3D Dynamics & control)介绍视频
媒体错误:格式不受支持或来源未找到
安装指南
在 Extract 之后,用您最喜欢的播放器观看。
英文字幕
画质:720p
声明:本站所有文章,如无特殊说明或标注,均为本站发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。
![Udemy——打造你自己的自动驾驶汽车| [课程1 & 课程2] ( Build your Own Self Driving Car| [Course 1 & Course 2] )](https://www.postcode.vip/wp-content/uploads/2023/03/1677817284-790aacd421f44b9-300x200.png)


