

课程描述
ROS for Beginners II: Localization, Navigation and SLAM是由Udemy Academy出版的一门关于使用ROS在各类移动机器人中同步定位和建图(SLAM)和机器人导航的培训课程。检查路径中的定位、映射、路由和移动是机器人设计和开发中最重要的主题之一。这些主题本身就非常复杂,当它们相互作用时会变得更加复杂。常规的和老旧的课程为学生提供了这两个领域非常好的理论信息,但是他们所提供的信息没有一个是实用的和适用的,实际上并不能把机器人领域的工程师带到任何地方。使用 ROS 工具集和库实现路由功能是一项非常艰巨的任务,需要实践。
本培训课程完全以实践和项目为导向,您使用实用和系统的方法来教授理论和实践主题。在介绍了几乎每个理论主题之后,您将对其进行编程和实施,您将在实践中受益于所学的技术。本培训课程不适合初学者和对 ROS 没有专门知识的人,希望学员在开始课程前熟悉 ROS 节点、主题、服务以及与机器人运动和不同动作相关的一般主题.有
您将在 ROS for Beginners II 中学到什么:定位、导航和 SLAM
- 2D 和 3D 定位
- 2D 和 3D 空间中帧之间的过渡
- tf包强大实用的引入frame并进行transfer和localization操作的能力
- 定位和映射幕后的理论问题
- 路线及其先决条件主题,例如预防事故和……
- 基于地图的路由和反应式路由之间的区别
- 和 …
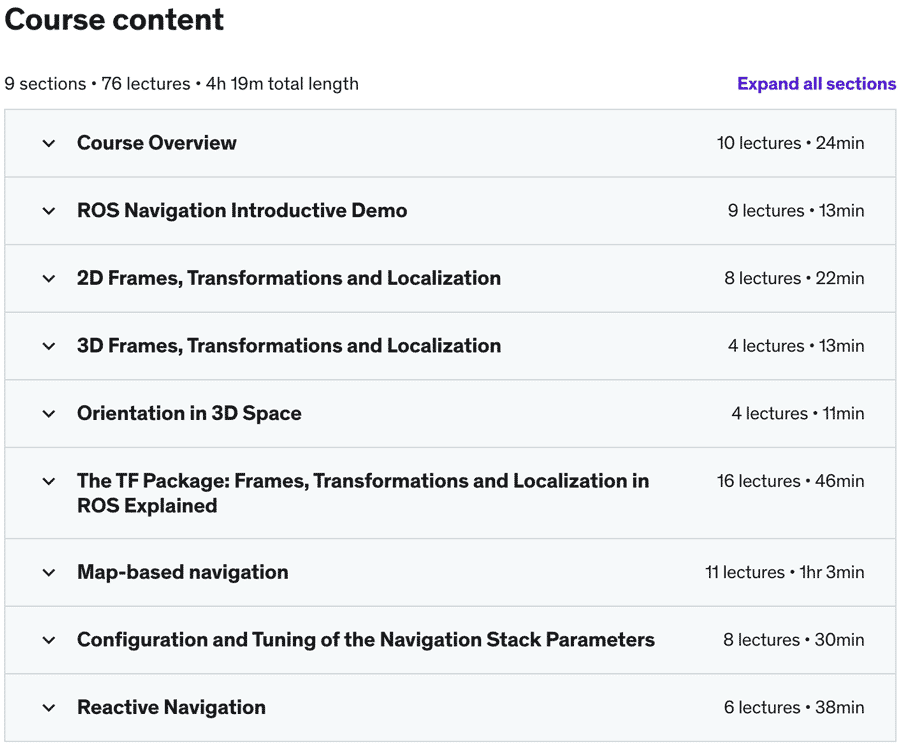
课程规格
出版商:Udemy 讲师:Anis Koubaa 语言:英语水平:中级课程数量:76 课时:4 小时 19 分钟
课程主题
ROS 初学者 II:定位、导航和 SLAM 先决条件
预先了解机器人操作系统 (ROS) 的基本概念(必需) 了解 C++ 和/或 Python 编程语言 具有线性代数、三角学和几何概念的背景 想学习 ROS 渴望学习机器人导航
图片
ROS for Beginners II: Localization, Navigation and SLAM 介绍视频
媒体错误:格式不受支持或来源未找到
安装指南
在 Extract 之后,用您最喜欢的播放器观看。
英文字幕
画质:720p
声明:本站所有文章,如无特殊说明或标注,均为本站发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。



